כונני AC בתדר משתנה 6.6kv 11kv 1000kW מתח בינוני VsD VfD
1. מיקום תקלה מדויק ופונקציית הקלטה
2. מתח אוטובוס יחידה, פונקציית תצוגת טמפרטורה
3. מתח הפעלה, זרם, שיא תדר יכול להיות שאילתה
4. ספק כוח בקרה כפולה
5. הפיתול המשני של השנאי משמש ככוח בקרת גיבוי כדי להבטיח את בטיחות המערכת במהלך הפעולה.
6. שיטות שליטה מרובות
7. הבחירה של שליטה מקומית, שלט תיבת שלט רחוק, שליטה DCS
8. תמיכה MODBUS, PROFIBUS ופרוטוקולי תקשורת אחרים
9. ניתן לתת את הגדרת התדר במקום, ניתנת התקשורת וכו'.
10. תמיכה בהנחת תדר, תאוצה ותפקוד האטה
11. עם צפיפות הספק גבוהה לפני העמיתים
12. נפח יחידה קטנה, עיצוב מודולרי
13. כל המכונה קומפקטית ותופסת מקום קטן
14. מנגנון הגנה מושלם
15. היחידה מכילה 7 סוגי הגנה, והמכונה כולה עדיין פועלת לאחר התקלה.
16. כל המכונה כוללת את ההגנה על ממיר התדרים והגנת המנוע.
17. ביצועי שליטה גבוהים
18. וסת PID מובנה;
19. ניתן להתאים אותו לשדות שונים לפי הגדרת פרמטר, וההרמוניה של זרם המוצא היא פחות מ-2% (מדורג).
| פריט | יחידה | נתונים |
| מתח נכנס | תדר, מתח | תלת פאזי, 50 הרץ, 6 קילו וולט (10 קילו וולט) |
| תְנוּדָה | מתח:-10% ~ +10%, תדירות: ±5%,-10% ~ -35% | |
| תפוקה מדורגת | מתח מוצא | תלת פאזי 0--6kV(0--10kV) |
| עֲקוּמָה | הכפל גלי סינוס SPWM | |
| קיבולת עומס יתר | 130% 1 דקה, 150% 3 שניות | |
| תכונה בסיסית | דיוק | הגדרה אנלוגית: 0.3% מערך הגדרת התדר הגבוה ביותר |
| הגדרה דיגיטלית: 0.02% מערך הגדרת התדר הגבוה ביותר | ||
| יְעִילוּת | > 98%, במצב דירוג | |
| גורם כוח | >0.95 | |
| גורם שליטה | זמן האצה וההאטה | 0.1 ~ 6000.0S, ניתן להגדיר את זמן האצה וההאטה בנפרד |
| התכונה של מתח ותדר | נקבע לפי עקומת V/F | |
| PID | ניתן להגדיר את הפרמטרים של PID ביד | |
| הפונקציות האחרות | עקומת V/F, פיצוי על התדר הנמוך, מדורגת | |
| רץ | מצבי פעולה | שליטה במכונה, שלט רחוק, שליטה במחשב המארח |
| מצבי הגדרת תדר | הגדרה על מסך מגע, הגדרת מהירות רב-שלבית, הגדרת אות אנלוגי (4-20 mA) | |
| תצוגת מסך מגע | זרם יתר של המנוע, מתח יתר של המהפך, תת-מתח של המהפך, זרם יתר של התא, מתח יתר של התא, חימום יתר של התא, חוסר שלב של התא, כשל בתקשורת. | |
| פונקציית הגנה | זרם יתר של המנוע, מתח יתר של המהפך, תת-מתח של המהפך, זרם יתר של התא, מתח יתר של התא, חימום יתר של התא, חוסר שלב של התא, כשל בתקשורת. | |
| סביבה אווירה | אווירה | מקורה עם אוורור טוב וללא גזים קורוזיביים ואבק מוליך |
| גוֹבַה | מתחת ל-1000 מ'.צריך להעלות את ההספק המדורג כאשר הגובה הוא יותר מ-1000 מטר | |
| טֶמפֶּרָטוּרָה | -20~+65 מעלות צלזיוס | |
| לחות | 90%RH ללא עיבוי טל | |
| רֶטֶט | <0.5G | |
| הִתקָרְרוּת | קירור אוויר מאולץ |
|
דֶגֶם |
רמת הספק | גודל ומשקל | |||
| רוחב (W) (מ"מ) | עומק (D) (מ"מ) | גובה (H) (מ"מ) | משקל (ק"ג) | ||
| JD-BP37-250F | 250 קילוואט/6 קילוואט | 2300 | 1500
| 1900 | 1320 |
| JD-BP37-280F | 280 קילוואט/6 קילוואט | 1380 | |||
| JD-BP37-315F | 315 קילוואט/6 קילוואט | 2465 | |||
| JD-BP37-400F | 400 קילוואט/6 קילוואט | 2595 | |||
| JD-BP37-500F | 500 קילוואט/6 קילוואט | 3410 | |||
| JD-BP37-560F | 560 קילוואט/6 קילוואט | 3460 | |||
| JD-BP37-630F | 630 קילוואט/6 קילוואט | 2900 | 2120 | 3620 | |
| JD-BP37-710F | 710 קילוואט/6 קילוואט | 3825 | |||
| JD-BP37-800F | 800 קילוואט/6 קילוואט | 3945 | |||
| JD-BP37-1000F | 1000 קילוואט/6 קילוואט | 4500 | |||
| JD-BP37-1100F | 1100 קילוואט/6 קילוואט | 6000 | |||
| JD-BP37-1250F | 1250 קילוואט/6 קילוואט | 3300 |
1700 | 2420 | 6900 |
| JD-BP37-1400F | 1400 קילוואט/6 קילוואט | 7600 | |||
| JD-BP37-1600F | 1600 קילוואט/6 קילוואט | 3600 | 8000 | ||
| JD-BP37-1800F | 1800 קילוואט/6 קילוואט | 8400 | |||
| JD-BP37-2000F | 2000 קילוואט/6 קילוואט | 8700 | |||
| JD-BP37-2250F | 2250 קילוואט/6 קילוואט | 9700 | |||
| JD-BP37-2500F | 2500 קילוואט/6 קילוואט | 10700 | |||
| JD-BP37-3250F | 3250 קילוואט/6 קילוואט | 5800 | 2620 | 11700 | |
| JD-BP37-4000F | 4000 קילוואט/6 קילוואט | 13200 | |||
| JD-BP37-5000F | 5000 קילוואט/6 קילוואט | 9400 | 15700 | ||
| JD-BP37-5600F | 5600 קילוואט/6 קילוואט | 17800 | |||
| JD-BP37-6300F | 6300 קילוואט/6 קילוואט | 20000 | |||
| JD-BP37-7100F | 7100 קילוואט/6 קילוואט | 22300 | |||
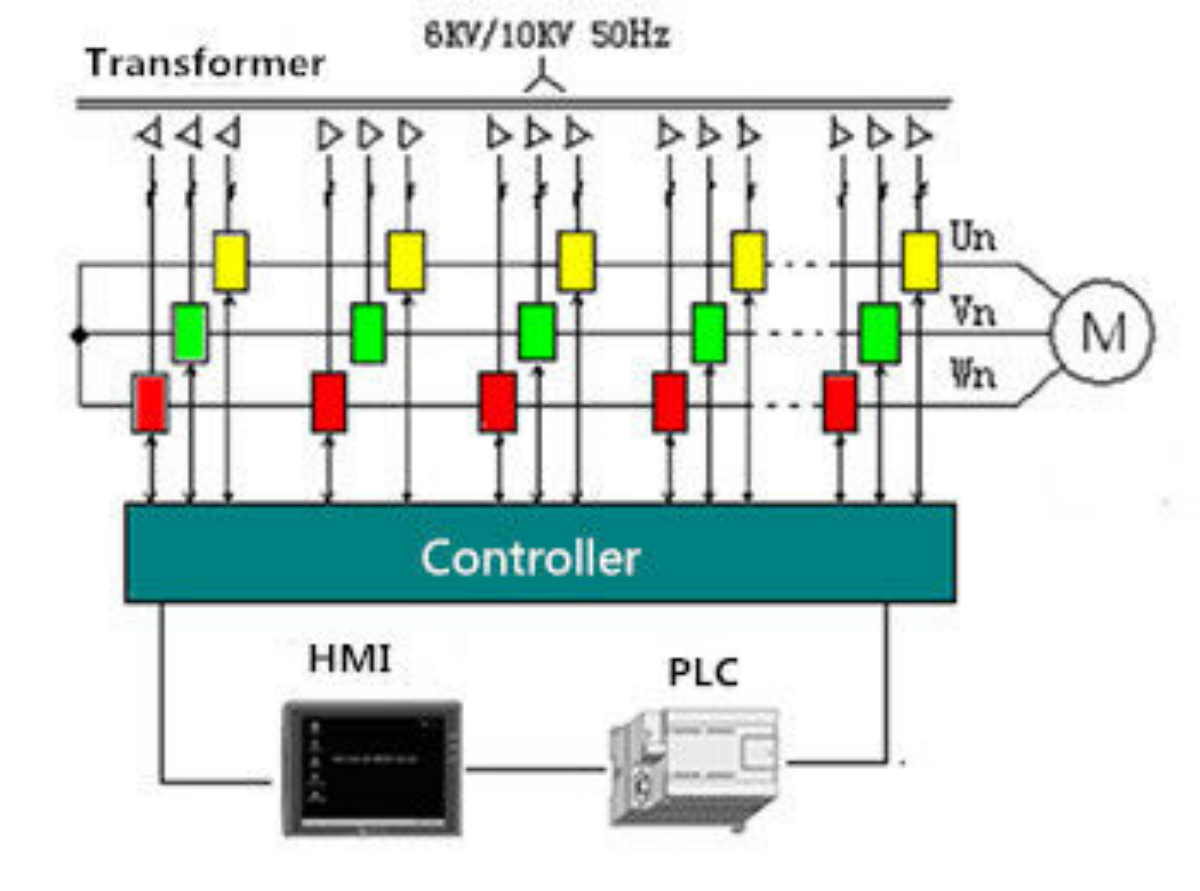
המבנה של מהפך מתח גבוה מסדרת JD-BP37/38 כולל שנאי המרת פאזה, תאי כוח ובקר.
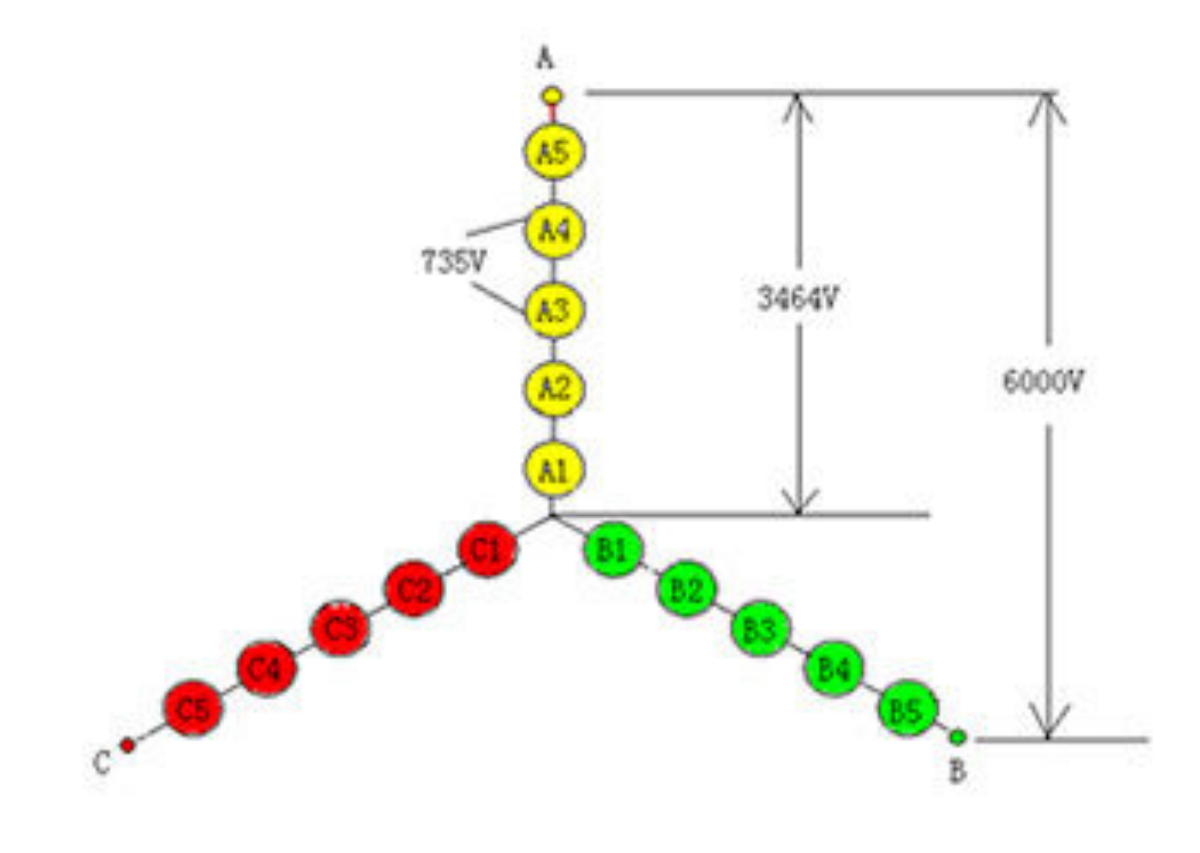
מהפך מסדרת 6kV מכיל 5 תאים בכל שלב, 15 תאים בסך הכל.
מהפך מסדרת 10kV מכיל 8 תאים בכל שלב, 24 תאים בסך הכל.
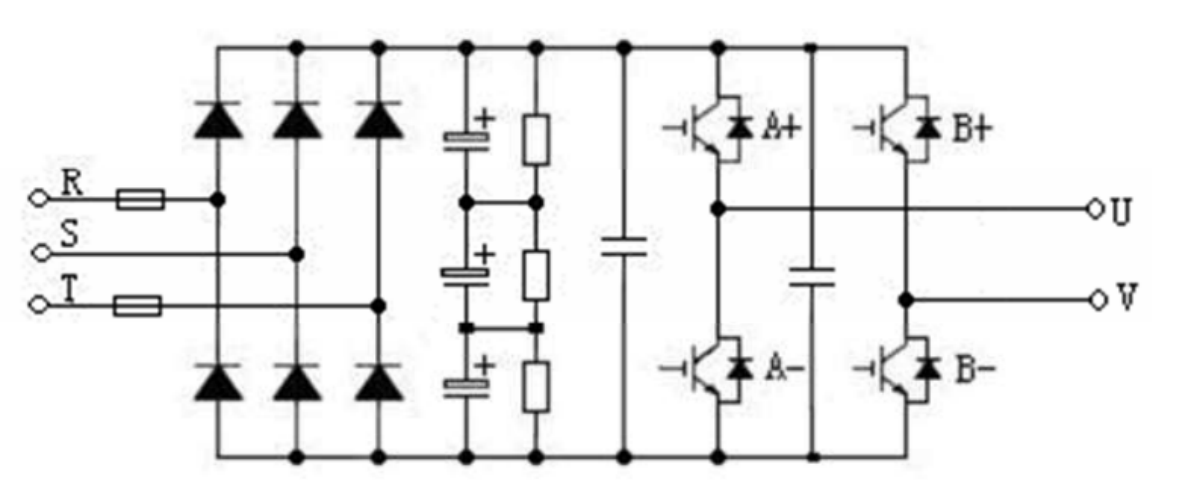
המבנים של תא כוח נפוצים.זהו מעגל מהפך AC -DC - AC חד פאזי, דיודות מיישר מיועדות לגשר IGBT 23 מהפך בגל מלא תלת פאזי הנשלט על ידי טכנולוגיית PWM סינוסואידית.כל תא כוח זהה, קל להפעיל, לתחזק ולבצע את החילוף, אם מתרחש תקלה, הגשרים למעלה מופעלים כדי להשיג את המעקף והפלט של המהפך מואט.